
Undervattensinspektion med ROV
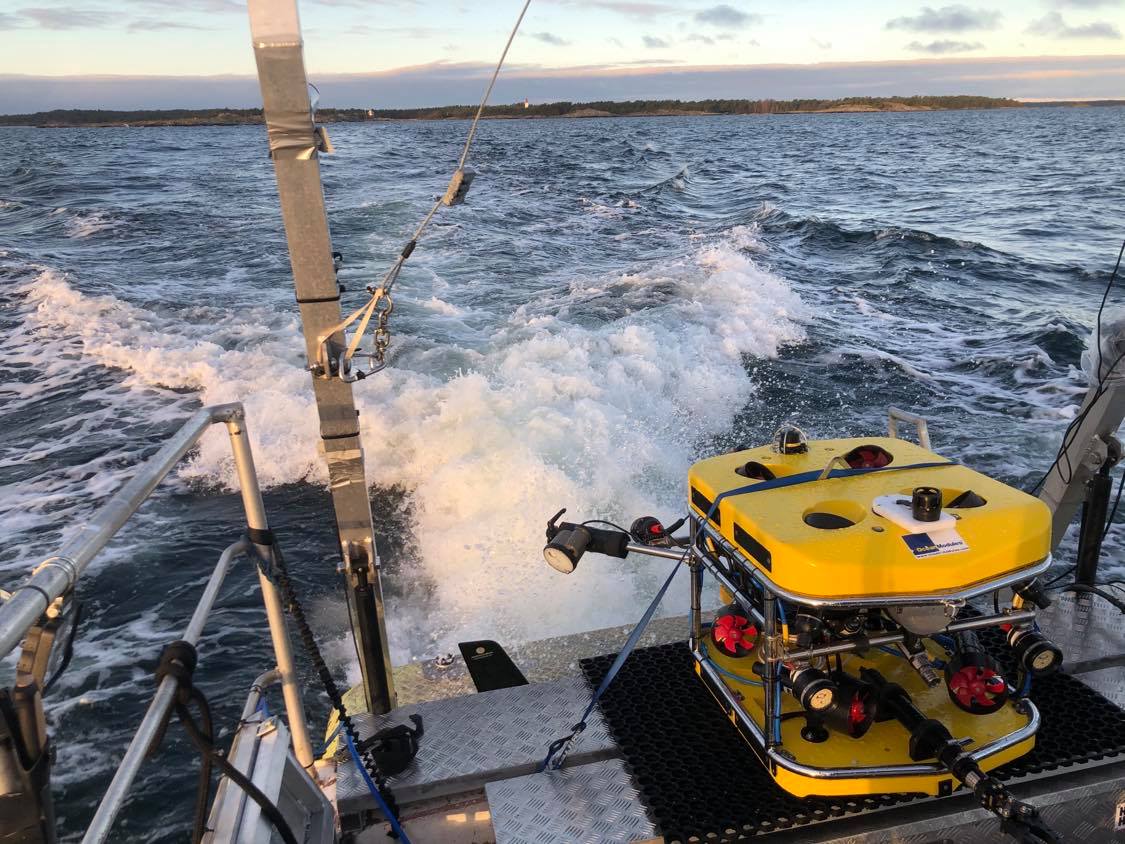
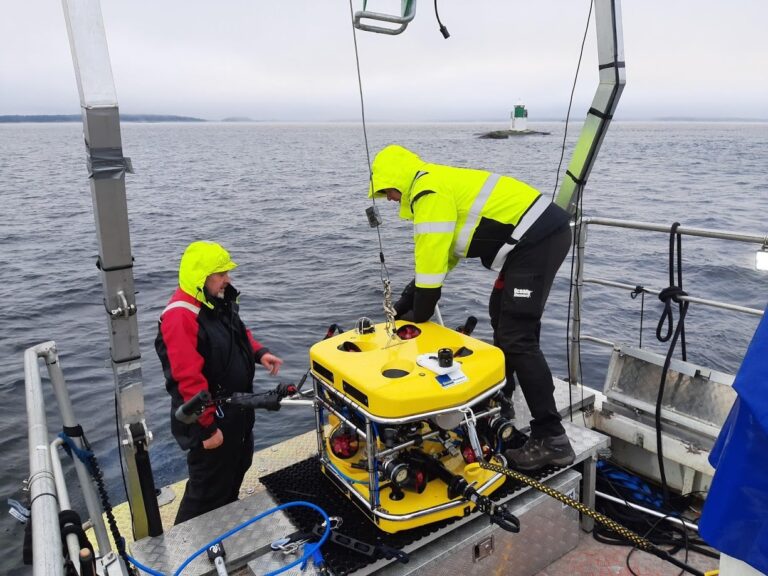
Ocean Discovery använder senaste tekniken inom undervattensinspektion och fjärrstyrda undervattensrobotar (ROV). Svensktillverkade Ocean Modules V8 M500 Intervention har förmågan att manövrera i sex ledder och 360 grader med bibehållen stabilitet vilket är värdefullt vid alla typer av undervattensinspektioner. ROV kan smidigt manövrera runt hinder och inta en optimal vinkel mot objektet som ska besiktigas. Åtta kraftfulla motorer ger en toppfart på hela 3 knop och möjliggör arbete även i kraftigt strömmande vatten.
{kind=link}
{kind=link}
ROV Inspektion och undersökning med video
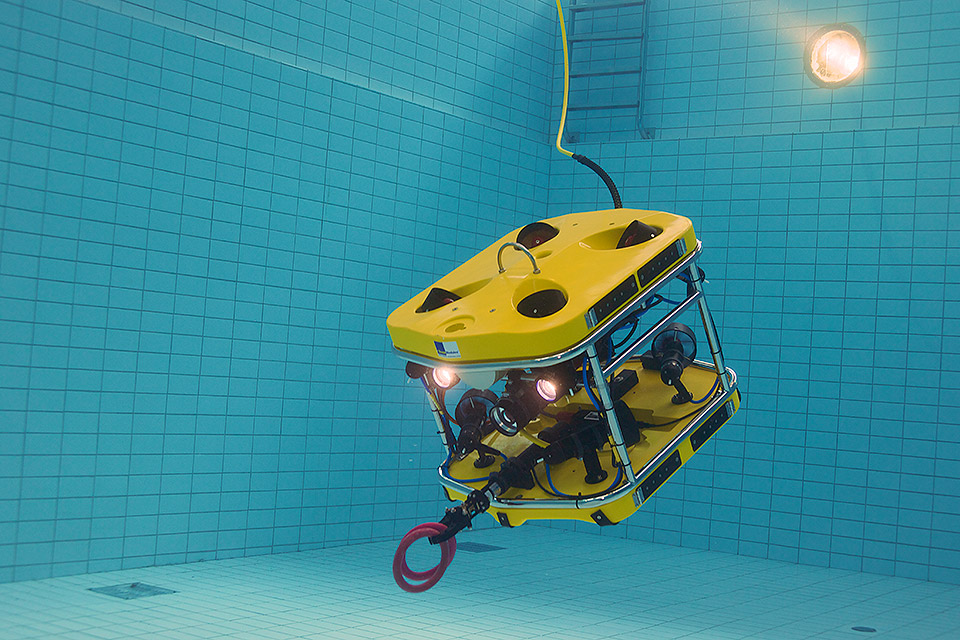
ROV´n är utrustad med fyra videokameror placerade både fram och bak vilket bidrar till hög situationsmedvetenhet och säkerhetsställer att ingenting missas vid undervattensinspektioner. Utöver videokameror är ROV´n utrustad med en ultrahögupplöst DSLR kamera som styrs från ytan via Ethernet i realtid. Kameran används vid 3D scanning/fotogrammetri men även vid vanliga videoinspektioner. V8 M500 kan operera ned till 500m djup och tillsammans med undersöknings fartyget Otto som är utrustad med elektriska motorer som kan hålla kvar fartyget på position så behövs ingen ankring vilket möjliggör inspektioner och besiktningar i havsmiljö på stora djup. Även så kallade follow sub operationer där fartyget långsamt följer ROV vid långa ledningsinspektioner är möjliga.
Undervattensinspektion med sjöuggla (ROV)
Realtids sonar och positionsbestämd video
Med hjälp av så kallad 2D realtids sonar får man en snabb överblick av omgivningen som används för navigering och undvikande av hinder. Sonaren arbetar med hög frekvens och ger en detaljerad bild oavsett sikt i vattnet och har en räckvidd upp till 100m. Bilden uppdateras i realtid och sonaren kan användas för observation på säkert avstånd vid arbeten där föremål sänks ned till botten så som säckar eller fyllningsarbeten. Sonaren är också ett utmärkt verktyg vid sök och bärgnings operationer och har tillräcklig upplösning för att upptäcka kroppar. Positionsbestämd video innebär att med hjälp av undervattenspositionerings utrustning (USBL) geografisk refererar varje bildruta. Vid inspektioner är det kritiskt att veta exakt var observationer görs.
Multisensor övervakning

Typiska uppdrag
- Bottenundersökningar
- Inspektioner och besiktning av hamnar och kajer
- Inspektioner av sjöledning, kablar och rör
- Undersökning av vrak och fornlämningar
- Farledsinspektion
- Sök och bärgningsuppdrag
- ROV sonarundersökning